













OCTOPUS干涉仪
The OCTOPUS 机器人干涉仪使用一个多轴运动系统,将相机移动到硬化连接器的套圈端面。 该系统对安装在飞机或船舶上的配线架、服务器盒和其他光网络单元中的军用和恶劣环境连接器内的每个光纤端头进行端面几何测量和异常检测。 该项目 OCTOPUS 措施 纤维高度 和 曲率半径 在组件仍在使用的情况下,每个端部都会有相应的保护措施。
- 多端头端面的几何形状
- 机器人X、Y轴定位
- 异常情况检测
| 参数 | 规格 |
| SENKO零件编号 | OCTOPUS |
| 检查过的连接器 | MIL-DTL-38999 和其他MIL规格和恶劣环境的多卡套连接器 |
| 视野 | D = 1.6 mm 覆盖面积 Y、X轴运动:±12.5毫米 |
| 光学分辨率 | 3.2 μm |
| 放大倍数 | 300× |
| 焦点 | 自动对焦 |
| 焦点范围 | 4毫米 |
| 测量模式 | 白光+相移 |
航空航天光网络

军事通信网络

海军通信

能源勘探和生产

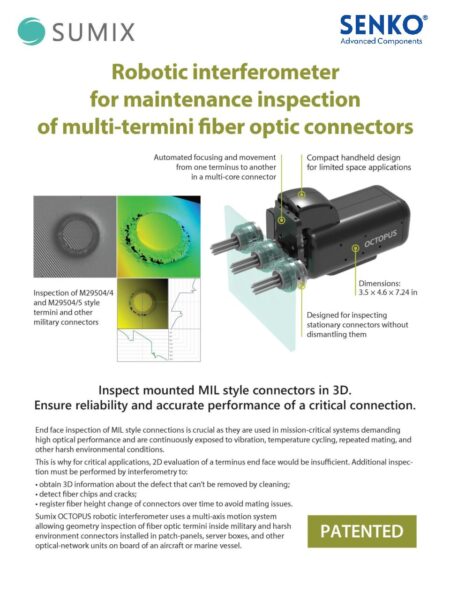


OCTOPUS使用一个多轴运动系统来扫描三维表面,并自动测量光纤连接器每个终端的几何参数。
目前可用的适配器范围包括用于检查的适配器。
- MIL-DTL-38999连接器,III系列,外壳尺寸15,插座,插针。
- MIL-DTL-38999连接器,III系列,外壳尺寸25,插座,插针。
- MIL-DTL-38999连接器,III系列,外壳尺寸25,插头,插座和插脚。
根据客户的要求,可以增加其他适配器。
每个端面的扫描和测量时间为10秒。 一个有六个端面的连接器将需要大约1分钟。


