













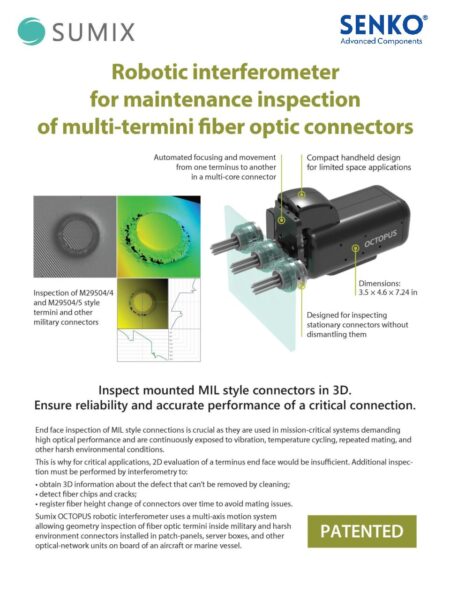
OCTOPUS-Roboter-Interferometrie
Die OCTOPUS Roboterinterferometer verwendet ein mehrachsiges Bewegungssystem, um die Kamera zu den Ferrule-Endflächen von gehärteten Steckern zu bewegen. Dieses System führt Messungen der Endflächengeometrie und die Erkennung von Anomalien für jeden der Glasfaseranschlüsse in militärischen und rauen Umgebungen durch, die in Patch-Panels, Serverboxen und anderen optischen Netzwerkeinheiten an Bord von Flugzeugen oder Schiffen installiert sind. Das OCTOPUS Maßnahmen Faserhöhen und Krümmungsradius für jeden der Endpunkte, solange die Baugruppe in Betrieb ist.
- Multi-Termini-Endflächengeometrie
- Positionierung der X- und Y-Achse durch Roboter
- Erkennung von Anomalien
| Parameter | Spezifikationen |
| SENKO-Teilenummer | OCTOPUS |
| Geprüfte Steckverbinder | MIL-DTL-38999 und andere MIL-Spezifikationen und Mehrfachsteckverbinder für raue Umgebungen |
| Sichtfeld | D = 1,6 mm Erfasste Fläche Bewegung der Y- und X-Achse: ± 12,5 mm |
| Optische Auflösung | 3,2 μm |
| Vergrößerung | 300× |
| Schwerpunkt | Autofokus |
| Fokusbereich | 4 mm |
| Modus Messung | Weißes Licht + Phasenverschiebung |
Optische Netze für die Luft- und Raumfahrt

Militärische Kommunikationsnetze

Schiffskommunikation

Energieexploration und -produktion

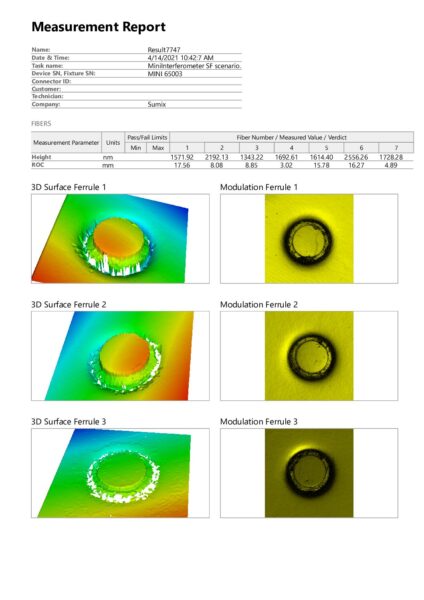
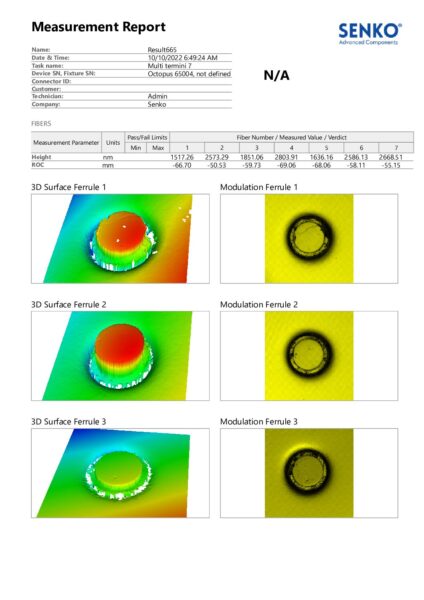


OCTOPUS nutzt ein mehrachsiges Bewegungssystem, um die 3D-Oberfläche zu scannen und die Geometrieparameter für jeden Endpunkt eines Glasfasersteckers automatisch zu messen.
Das derzeitige Angebot an Adaptern umfasst die Adapter für die Inspektion von:
- MIL-DTL-38999 Steckverbinder, Serie III, Gehäusegröße 15, Buchse, Buchseneinsatz und Stifteinsatz;
- MIL-DTL-38999 Steckverbinder, Serie III, Gehäusegröße 25, Buchse, Buchseneinsatz und Stifteinsatz;
- MIL-DTL-38999 Steckverbinder, Serie III, Gehäusegröße 25, Stecker, Buchseneinsatz und Stifteinsatz.
Andere Adapter können auf Wunsch des Kunden hinzugefügt werden.
Die Scan- und Messzeit beträgt 10 Sekunden pro Endfläche. Für einen Steckverbinder mit sechs Endpunkten würde etwa 1 Minute benötigt.


